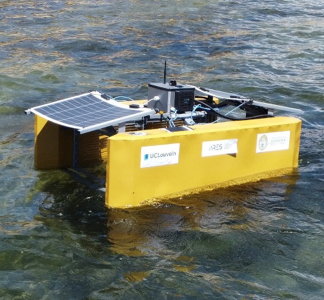
Hasta la actualidad, desarrollamos tres vehículos acúaticos para la limpieza y muestreo de cuerpos de agua.

Vehículo con capacidad para recolectar 72 muestras distribuidas en grandes superficies acuáticas.
Nuestro sistema de muestreo basado en vehículos autónomos sigue una serie de pasos que garantizan su correcto funcionamiento, desde la navegación hasta el análisis de las muestras recolectadas.

Recolección de Muestras

Análisis de Muestras

Registro de Datos Local y Sincronización con la Nube
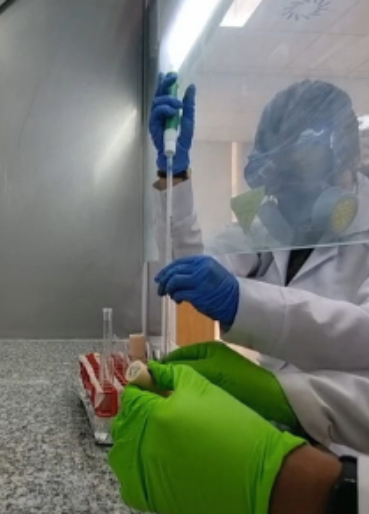
Verificación en Laboratorios
El agua es un recurso esencial para la vida, pero en muchas regiones está siendo contaminada silenciosamente por actividades como la minería ilegal y la descarga de desechos domésticos e industriales. Estas sustancias representan un grave riesgo para la salud humana y los ecosistemas. A pesar de la magnitud del problema, la falta de monitoreo constante impide una respuesta rápida y efectiva.
Lo que no se mide, no se controla. Por esto, en el 2022, formamos un grupo de investigación basado en la Universidad Católica Boliviana "San Pablo" , interesado en el desarrollo de herramientas automatizadas para monitorear y controlar fuentes de agua de manera eficiente y que sirva para tomar acciones rápidas a favor del medio ambiente. Actualmente, brindamos servicios a las industrias e instituciones públicas con tecnologías exponenciales para que mejoren el control de los cuerpos de agua eficiencia de sus y contribuyan al cuidado ambiental.

Nuestra misión es innovar mediante sistemas inteligentes basados en vehículos autónomos para la medición continua de la calidad del agua, con el fin de empoderar a la ciudadanía y a los gobiernos locales. En el camino hacia una mejor evaluación de la calidad del agua, hemos alcanzado los siguientes objetivos.





Contamos con un equipo multidisciplinario de investigadores comprometidos con la innovación tecnológica y la mejora del monitoreo ambiental.
El presente proyecto no sería posible sin el apoyo de las siguientes instituciones.
¡Gracias por tu interés en nuestro grupo de investigación! Estamos abiertos a oportunidades de implementación de nuestros vehículos tanto en la industria como en el ámbito académico. Nuestro grupo busca continuamente estudiantes de pregrado y maestría de la UCB interesados en la investigación. Por favor, no dudes en ponerte en contacto con nosotros a través de nuestras redes.
Copyright © Proyecto HydroBot 2025.